Intelligent perception in autonomous robotic navigation
Konrad Cop
supervisor: Tomasz Trzciński
Autonomous robots can significantly facilitate human work, however, full automation of work is still a huge challenge. The main difficulty is to successfully navigate in highly variable environments. Robot's behaviour is planned in a previously generated representation of an environment called basemap. Normally, the basemap is fixed and does not provide updates opportunity. In situations when the environment changes, the information contained in the basemap used to plan activities deviates from the currently perceived state of the environment, resulting in general suboptimal robot behavior. This challenge can be solved through the perception that takes into account the previous experience of the robot operating in a given environment.
In the classic approach to robotic navigation, the data obtained from sensors is used only at the planning stage. Thanks to the use of machine learning, using previous observations, a lot of additional information can be inferred already in the perception phase. Such information can e.g. include the class of the object, the estimation or missing part or the predicted trajectory of observed objects. The aim of the research is to improve the navigation system by using historical observations of the robot to improve the current perception.
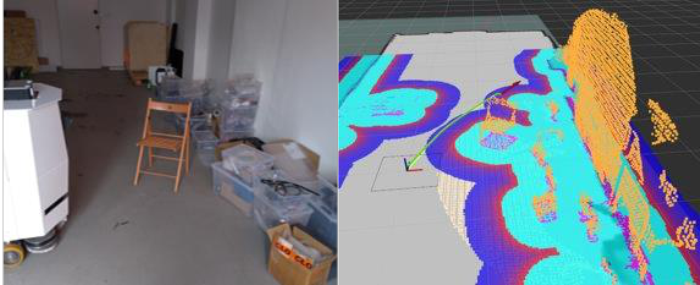
Fig. 1 The way robots perceive environment.