Introduction to radar tracking
Marek Ciesielski
supervisor: Mateusz Malanowski
The presentation shows some of the most important issues related to radar tracking. It focuses on estimating the parameters of the observed object such as distance and radial speed. It also describes ways to improve the results with the Kalman filter. There are some simulations and measurements that confirm the effectiveness of the presented solutions and indicate the direction of actions for further improvements.
The primary task of a typical radar tracker is to handle plots. Plots are produced in the previous processing steps during the detection process. Tracking module In the radar system may have to handle millions of plots every millisecond. They can be real or fake, but always contain some informations about the probable echoes from the targets such as:
- distance,
- radial velocity,
- acceleration,
- SNR,
- amplitude,
- azimuth angle,
- elevation angle.
A simplified example is shown in Figure 1. Plots (yellow stars) were detected within 7 seconds of observation with 200 ms of integration time. Some of them come from the drone.
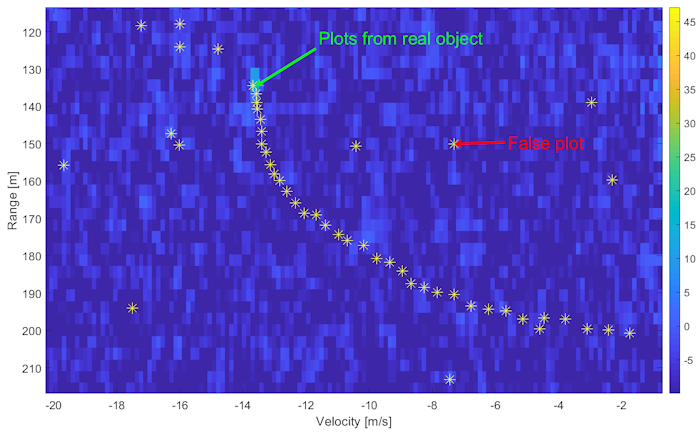
Fig. 1 Small fragment of crossambiguity function from FMCW radar system detecting drones.
As it shown on Figure 1 plots are not ideal, and the estimation of range and velocity is quite far from reality. There is a noise (assumed to be white) that affects the estimate of the plot parameters. Fortunately, in the long-term observations required to determine if a plot is fake or not, its parameters can be improved by applying the appropriate Kalman filter.